Large Language Models (LLMs) have recently shown strong promise for robotic task planning, particularly through automatic planning domain generation. However, prior approaches largely treat generated planning domains as planning utilities, which are brittle under imperfect logical states and perception noise, overlooking their potential as scalable sources of reasoning supervision and structured reward signals. At the same time, reasoning LLMs depend on chain-of-thought (CoT) supervision that is expensive to collect for robotic tasks, and reinforcement learning (RL) faces challenges on reward engineering.
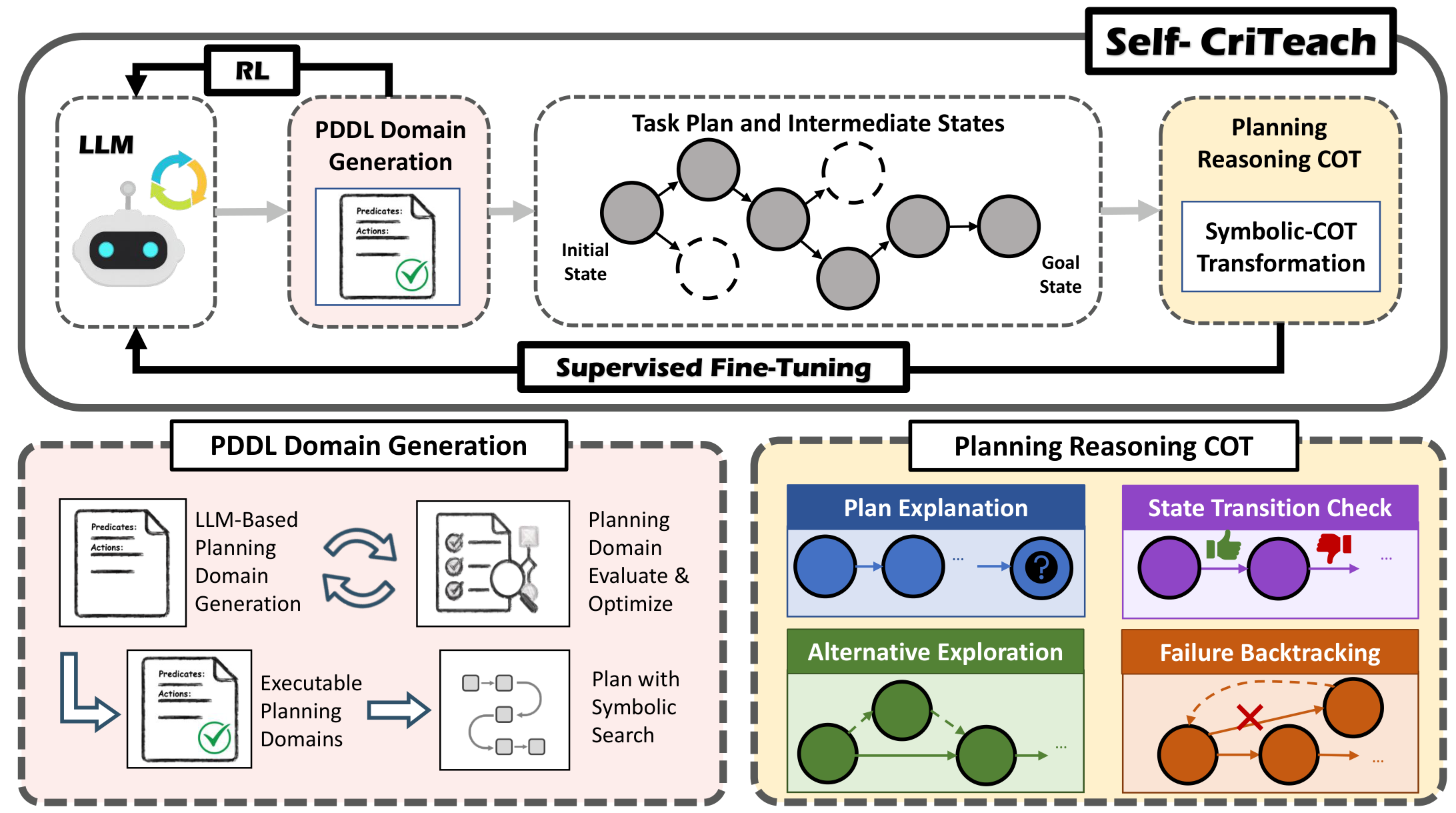
We propose Self-CriTeach, an LLM self-teaching and self-critiquing framework in which an LLM autonomously generates symbolic planning domains that serve a dual role: (i) enabling large-scale generation of robotic planning problem–plan pairs, and (ii) providing structured reward functions. First, the self-written domains enable large-scale generation of symbolic task plans, which are automatically transformed into extended CoT trajectories for supervised fine-tuning. Second, the self-written domains are reused as structured reward functions, providing dense feedback for reinforcement learning without manual reward engineering. This unified training pipeline yields a planning-enhanced LLM with higher planning success rates, stronger cross-task generalization, reduced inference cost, and resistance to imperfect logical states.
Key Contributions
🔄
Self-CriTeach Framework
A novel automated framework that treats LLM self-generated PDDL planning domains as reusable knowledge sources, whose compositional structure powers both scalable supervision for self-teaching and structured rewards for self-critiquing via RL.
📚
Self-Teaching via Data Generation
The base LLM produces validated long-horizon planning datasets that extend beyond its intrinsic planning capacity, then uses this data for SFT — no human annotation required.
🧠
Automatic Symbolic-to-CoT Transformation
An automatic procedure that converts symbolic plans and intermediate states into chain-of-thought reasoning traces (plan explanation, state-transition checking, alternative exploration, and failure backtracking), shown to be highly effective for self-teaching.
🎯
Self-Critiquing with Planning Domains
The system reuses self-generated PDDL planning domains as structured reward functions, enabling post-training RL without any manual reward engineering.
📈
Empirical Gains
Self-CriTeach yields a planning-enhanced LLM with robust planning performance, stronger cross-task generalization, reduced inference token cost, and resistance to imperfect logical state estimation.
Method Overview
LLM Generates Rules. The base LLM generates PDDL planning domains as planning rules.
Rules Generate Data. Planning domains produce task plans with intermediate states.
LLM Explains Data. The LLM explains raw symbolic plans into Chain-of-Thought traces.
LLM Learns. SFT on CoT traces, then RL with planning domains as reward functions.
Experimental Results
We evaluate Self-CriTeach on the Blocksworld benchmark suite (seen: BW Classic, BW Hard, BW Align) and on three unseen task types (Prepare Experiment, Reorganize Room, Machine Parts Assembly), measuring planning success rate (fraction of tasks fully solved) and progress score (fraction of goal predicates satisfied).
Table 1 — SCT-4B vs. SOTA baselines of similar size
Despite operating at a much smaller scale, SCT-4B consistently outperforms every same-tier open-source baseline. The advantage is most pronounced on long-horizon (BW Hard) and unseen task distributions.
Model
Seen — Success Rate
Unseen — Success Rate
Overall
BW Classic
BW Hard
BW Align
Prep. Exp.
Reorg. Room
Mach. Parts
Success
Progress
SCT-4B (ours)
0.60
0.45
0.75
0.45
0.18
0.50
0.46
0.76
Qwen3-8B
0.48
0.28
0.69
0.33
0.19
0.40
0.35
0.68
Qwen3-4B
0.41
0.24
0.42
0.24
0.12
0.34
0.26
0.59
Mistral-24B
0.21
0.11
0.71
0.18
0.10
0.12
0.21
0.49
Ministral-8B
0.03
0.02
0.05
0.01
0.02
0.02
0.02
0.14
Gemma3-12B
0.09
0.08
0.14
0.06
0.04
0.11
0.08
0.56
Gemma3-4B
0.01
0.01
0.01
0.01
0.01
0.01
0.01
0.44
GPT-4o
0.31
0.17
0.54
0.10
0.05
0.11
0.19
0.55
Takeaway: SCT-4B delivers a +20% absolute gain in overall success rate over its base model Qwen3-4B, including +21% on BW Hard — evidence that the gains come from internalized planning capability, not memorization.
Table 2 — SCT vs. training/inference baselines (Qwen3-4B backbone)
Holding the backbone fixed at Qwen3-4B, we compare Self-CriTeach against distillation from a 30B reasoning model, majority voting, self-distillation, and prompt-engineered CoT.
Method
Seen — Success Rate
Unseen — Success Rate
Overall
BW Classic
BW Hard
BW Align
Prep. Exp.
Reorg. Room
Mach. Parts
Success
Progress
SCT-4B (ours)
0.60
0.45
0.75
0.45
0.18
0.50
0.46
0.76
30B-Distill
0.50
0.31
0.74
0.23
0.16
0.49
0.36
0.54
Majority Vote
0.46
0.26
0.49
0.30
0.15
0.39
0.32
0.66
Self-Distill
0.45
0.23
0.44
0.25
0.13
0.35
0.28
0.62
Prompt-CoT
0.43
0.22
0.45
0.24
0.12
0.33
0.27
0.64
Takeaway: SCT-4B beats every alternative training/inference recipe — including distillation from a 30B model — suggesting symbolic-CoT supervision provides higher-quality signal than scaling up the teacher.
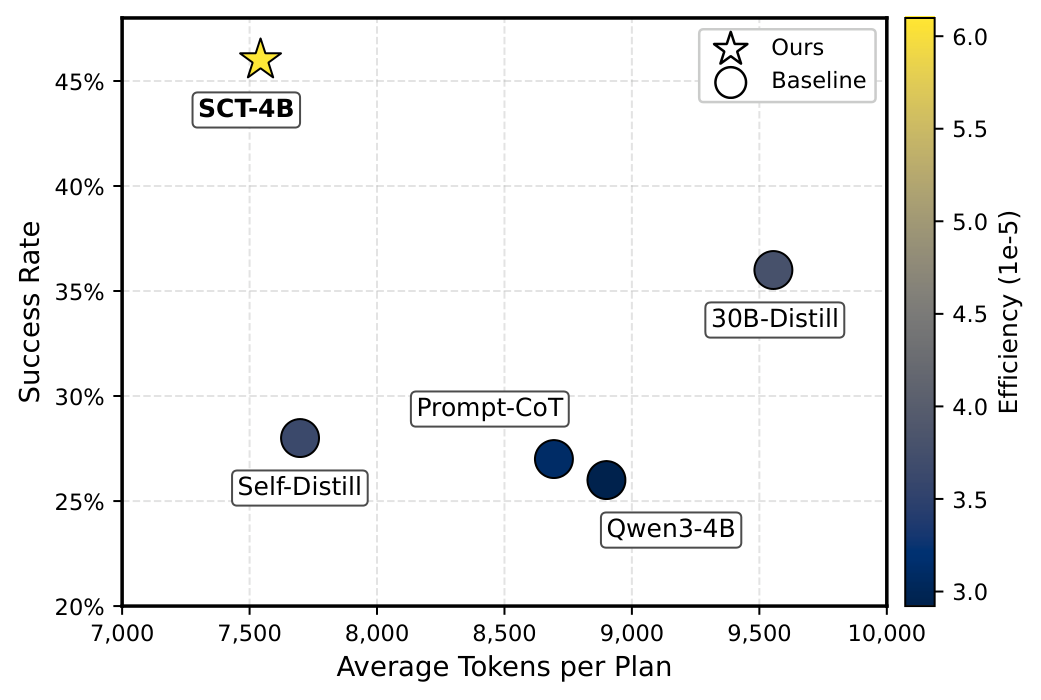
Figure 2 — Planning efficiency: success rate vs. token cost
Figure 2. Overall success rate vs. average per-plan token cost across top-performing baseline approaches. SCT-4B sits in the upper-left frontier — high success at low cost. Symbolic-CoT supervision eliminates reasoning steps that do not contribute to planning, producing concise yet effective reasoning traces.
Table 3 — Component ablation (vs. Qwen3-4B base)
We isolate each Self-CriTeach component: SFT only (SCTSFT), the longer-horizon CCS objective (SCTLCCS), Constrained Policy Optimization (SCTCPO), DPO (SCTDPO), and training on raw symbolic plans without CoT transformation (SCTSymbol).
Variant
Seen — Success Rate
Unseen — Success Rate
Overall
BW Classic
BW Hard
BW Align
Prep. Exp.
Reorg. Room
Mach. Parts
Success
Progress
SCT-4B (full)
0.60
0.45
0.75
0.45
0.18
0.50
0.46
0.76
SCTSFT-4B
0.58
0.41
0.67
0.42
0.17
0.49
0.43
0.67
SCTLCCS-4B
0.49
0.36
0.51
0.25
0.17
0.30
0.31
0.71
SCTCPO-4B
0.52
0.33
0.52
0.29
0.17
0.35
0.31
0.69
SCTDPO-4B
0.47
0.27
0.49
0.27
0.16
0.36
0.29
0.67
SCTSymbol-4B
0.54
0.34
0.84
0.16
0.14
0.50
0.38
0.62
Qwen3-4B (base)
0.41
0.24
0.42
0.24
0.12
0.34
0.26
0.59
Takeaway: SFT alone already moves overall success from 0.26 → 0.43; adding RL with structured rewards pushes it to 0.46. CPO consistently outperforms DPO. Training on raw symbolic plans without the CoT transformation (SCTSymbol) helps seen tasks but generalizes poorly to unseen ones, confirming the value of symbolic-to-CoT supervision.
Real Robot Experiments
PDDL-based task planners are brittle under incomplete or noisy logical states from imperfect perception. We deploy SCT-4B on a real UR5e robot — using its control API as low-level skills — and compare against a classical PDDL solver on two tasks under two perception pipelines: a rule-based classifier (low noise) and a VLM (Qwen3-VL-4B, high noise) that predicts logical states directly from images. Ten trials per task.
Reorganize Room. 13-step plan executed by SCT-4B on a UR5e.Prepare WetLab Experiment. 8-step water-bath heating routine.
Table 5 — Real-robot success rates
Comparison between SCT-4B and a classical PDDL solver under two perception pipelines. SCT-4B is markedly more robust to noisy logical-state estimates.
Logical-State Estimator
SCT-4B (ours)
PDDL Solver
Room
Lab
Room
Lab
Qwen3-VL-4B (high noise)
0.70
0.60
0.40
0.20
Rule-based Classifier (low noise)
0.80
0.90
0.70
0.70
Takeaway: Under the high-noise VLM pipeline, the PDDL solver collapses (0.40 / 0.20) while SCT-4B retains 0.70 / 0.60 — it reasons over partial symbolic observations rather than failing fast on missing or inconsistent predicates.
Code & Resources
💻
GitHub Repository
Complete implementation with training scripts, evaluation pipeline, and documentation.
# Install
pip install -r requirements.txt
# Load dataset
from datasets import load_dataset
ds = load_dataset("Self-CriTeach/pddl-planning-data")
# Once models are published, load by backbone via subfolder:
from transformers import AutoModelForCausalLM, AutoTokenizer
model = AutoModelForCausalLM.from_pretrained("Self-CriTeach/SCT", subfolder="Qwen3-4B")
tokenizer = AutoTokenizer.from_pretrained("Self-CriTeach/SCT", subfolder="Qwen3-4B")
# Generate plan
problem = "Static predicates: [[box, 1], [box, 2], [table, 0], [robot, r]]..."
inputs = tokenizer(problem, return_tensors="pt")
outputs = model.generate(**inputs, max_new_tokens=2048)
plan = tokenizer.decode(outputs[0], skip_special_tokens=True)
Citation
If you find this work useful, please cite:
@article{huang2025selfcriteach,
title = {Self-CriTeach: LLM Self-Teaching and Self-Critiquing for Improving Robotic Planning via Automated Domain Generation},
author = {Huang, Jinbang and Li, Zhiyuan and Hu, Yuanzhao and Zhang, Zhanguang and Coates, Mark and Quan, Xingyue and Zhang, Yingxue},
journal = {arXiv preprint arXiv:2509.21543},
year = {2025},
url = {https://arxiv.org/abs/2509.21543}
}
Team
Jinbang Huang
Huawei Noah's Ark Lab
Zhiyuan Li
Huawei Noah's Ark Lab University of Toronto
Yuanzhao Hu
Huawei Noah's Ark Lab University of British Columbia